6. Tecnologias de apoio à Mobilidade
As tecnologias de apoio à mobilidade baseiam-se em produtos de apoio que permitem a deslocação (preferencialmente autónoma) de uma pessoa em todos os contextos físicos em que se pretenda mover. O exemplo mais paradigmático é a cadeira de rodas. Descrevem-se, em seguida, alguns exemplos específicos de produtos de apoio à mobilidade.
6.1 Cadeiras de rodas
As cadeiras de rodas evoluíram ao longo dos tempos acompanhando a evolução dos materiais, das técnicas de fabrico disponíveis, e das correntes de design prevalecentes[34] . As cadeiras de rodas do século XVIII eram fabricadas em madeira e vime, eram muito influenciadas esteticamente pela mobília da época, e tinham uma aceitação social tal que eram usadas tanto por pessoas com deficiência como por pessoas sem deficiência. Na Inglaterra do século XIX as pessoas com elevados recursos económicos deslocavam-se em “cadeiras de banho” com rodas para termas ou estâncias balneares. Em 1932, a companhia Everest & Jennings colocou no mercado a primeira cadeira de rodas com uma estrutura tubular em aço, um grande avanço em termos de robustez e portabilidade. Essa cadeira tinha uma imagem moderna, na linha do estilo Bahaus, herdando características das cadeiras Wassily de Marcel Breuer e da cadeira balanceada MR de Mies van der Rohe. Mas, a partir da segunda metade do século XX, as cadeiras de rodas deixaram de acompanhar a evolução verificada nas peças de mobiliário. Tal deveu-se a um acentuar da visão médica da cadeira de rodas enquanto produto de apoio para pessoas com deficiência, em oposição à visão social. O facto de as estruturas tubulares em aço se encontrarem espalhadas por todos os equipamentos hospitalares (camas, bengalas, suportes, etc.) contribuiu também para a estagnação das cadeiras de rodas nestas estruturas, com rodas raiadas, semelhantes a bicicletas de montanha, que hoje estão estereotipadas. Esta alteração radical da forma como as cadeiras de rodas passaram a ser vistas está bem patente no facto de o símbolo internacionalmente reconhecido de pessoa com deficiência ser precisamente alguém em cadeira de rodas (Figura 6.1).

As características técnicas essenciais de uma cadeira de rodas incluem o seu peso e a posição do centro de massa que determinam a manobrabilidade e a estabilidade da cadeira. O peso é determinante para a portabilidade da cadeira, requisito que normalmente leva ao desenho de 71 cadeiras de rodas mais leves mas menos estáveis. O assento da cadeira é outro elemento essencial. Para os utilizadores que estão sentados na cadeira durante várias horas, o seu posicionamento e conforto é essencial, nomeadamente devido ao risco elevado de surgimento de escaras (principalmente nos utilizadores que não têm sensibilidade nos membros inferiores). Os assentos devem, por isso, ter uma forma adaptada ao utilizador e ser fabricados num material adequado, de modo a proporcionarem um apoio postural correto. Existem assentos em silicone (pesados, com propriedades que se alteram com a temperatura ambiente, mas do agrado de alguns utilizadores) e de espuma. Os assentos de espuma com alvéolos com ar permitem uma melhor adaptação ao utilizador. As cadeiras com costas mais elevadas proporcionam melhor apoio, com a desvantagem de restringirem os movimentos dos membros superiores. Algumas cadeiras permitem também regular a tensão dos encostos.
Consoante a atividade que se pretende realizar em cadeira de rodas, existem hoje muitas soluções, de que são exemplo as cadeiras de rodas para a prática desportiva (Figura 6.2) ou as cadeiras de rodas pediátricas (Figura 6.3). As cadeiras de rodas podem ser manuais, mais adequadas para trajetos relativamente curtos e para pessoas que mantenham a mobilidade dos membros superiores; ou elétricas (Figura 6.4), que permitem que pessoas com deficiência motora nos membros superiores possam deslocar-se autonomamente utilizando um joystick ou outros sistemas de seleção indireta (varrimento) para controlar a cadeira. As cadeiras elétricas são bastante mais pesadas sendo, por isso, mais difícil o seu transporte e armazenamento quando não estão em utilização.



Os fatores críticos na escolha de uma cadeira de rodas para um dado utilizador são (Cook & Polgar, 2008):
- Perfil do utilizador: incapacidade, idade, prognóstico, tamanho e peso;
- Necessidades da pessoa: atividades, contextos de uso, preferências, meios de transporte, fiabilidade, durabilidade, custo;
- Capacidades físicas e sensoriais: amplitude de movimentos, controlo motor, força, visão e perceção;
- Capacidades funcionais: transferência de e para a cadeira, capacidade de auto propulsionar a cadeira.
Em particular, deve ter-se em conta (Cook & Polgar, 2008): o posicionamento da pessoa na cadeira; o posicionamento do dispositivo de controlo; o método de transferência de e para a cadeira; a avaliação nos contextos indoor – tamanho, obstáculos, portas e raios de curvatura (e.g., em casa, avaliação do tamanho da cadeira na passagem pelas portas); avaliação nos contextos ao ar livre, em que a cadeira poderá ser usada em desníveis, diferentes pisos ou inclinações; distâncias a percorrer; manobrabilidade nos contextos do seu utilizador; necessidade de luzes e/ou buzina; montagem e desmontagem; método de carga, duração da bateria e sua manutenção (para cadeiras elétricas); transporte em veículos privados e públicos; armazenamento; e manutenção e reparação. Idealmente a avaliação deve, portanto, não só abarcar o indivíduo, mas também os diversos contextos em que o produto de apoio vai ser utilizado.
6.2 Cadeiras de transporte
Designam-se por cadeiras de transporte os dispositivos de transporte de uma criança ou jovem com deficiência e as cadeiras fixas para acomodar pessoas com deficiência num veículo ou num dado local fixo (e.g., escola, à mesa, etc.). Podem ser dotadas de vários tipos de acessórios para apoio ao posicionamento adequado de utilizadores com dificuldades no controlo do tronco e/ou da cabeça. Podem também possuir tiras adutoras ou abdutoras para manter os membros inferiores mais juntos ou mais afastados, respetivamente.
73Mostram-se seguidamente dois tipos de cadeiras de transporte: as de inclinação fixa (Figura 6.5 (A)), que mantêm sempre o utilizador numa posição vertical (10 graus de inclinação) ou inclinado (30 graus de inclinação para trás), e as de inclinação variável (Figura 6.5 (B)), que permitem ajustar a inclinação à atividade (por exemplo, a posição reclinada para trás pode ser mais adequada para o transporte, mas não favorece a interação social, quando frente a frente com outra pessoa que esteja sentada). Algumas destas cadeiras estão preparadas com sistemas de fixação para serem usados em transportes públicos ou ambulâncias, tendo sido submetidos a exigentes testes de colisão.


Há cadeiras fixas para diversas utilizações (e.g., sentar à secretária, sentar à mesa, sentar no chão). Normalmente possuem assentos laváveis, aos quais é possível adaptar diferentes encostos de cabeça, apoios de pés, cintos e tabuleiros, e que poderão servir por exemplo como assento de alimentação, como é o caso do assento da Figura 6.6.

No que diz respeito a cadeiras fixas para transporte em automóveis particulares, existem soluções capazes de acompanhar o crescimento da criança e que possuem acessórios para proporcionar o apoio adequado ao utilizador (ver Figura 6.7 (A)).Algumas destas cadeiras estão montadas numa estrutura rotativa para facilitar a colocação e extração da criança do veículo (Figura 6.7 (B)).
74

6.3 Elevadores de transferência
Os elevadores de transferência permitem transferir uma pessoa com mobilidade reduzida de um local para outro (de uma cadeira de rodas para uma cama ou para uma piscina, por exemplo). Estes elevadores são constituídos, usualmente, por sistemas hidráulicos ou elétricos acoplados a sistemas de suporte da pessoa. Os sistemas de suporte podem ser fundas, existindo diferentes modelos de fundas para se adaptarem a diferentes patologias e utilizações (Figura 6.8), ou suportes rígidos (Figura 6.11).

Existem elevadores de transferência para serem comandados por terceiros e elevadores de transferência que podem ser comandados pelos próprios (por exemplo, no caso de utilizadores paraplégicos). Os elevadores de transferência podem ser portáteis, como são exemplos os utilizados em muitas unidades de saúde (Figura 6.8) ou os utilizados em piscinas (Figura 6.9); ou podem ser fixos, constituindo-se como um dos componentes que permite adaptar uma habitação ao seu utilizador. A Figura 6.10 mostra elevadores de transferência aplicados em calha que correm no teto da casa, permitindo a deslocação entre locais pré-definidos da casa. Outro exemplo de elevador de transferência fixo, desta vez à parede de uma casa de banho adaptada, é apresentado na Figura 6.11.
75


Na prescrição deste produto de apoio é essencial perceber quem irá controlá-lo (o próprio utilizador ou o cuidador), qual a atividade a que se destina (e.g., transferência de uma cadeira de rodas para uma cama ou para uma piscina) e qual o contexto em que vai ser utilizado (unidade hospitalar ou em casa, por exemplo). Em termos técnicos, é necessário levar em conta aspetos de segurança (devem existir mecanismos de emergência que assegurem que uma pessoa nunca fica presa numa situação potencialmente perigosa – pendurada num teto, por exemplo) e aspetos de fiabilidade e facilidade de manutenção (são preferíveis os sistemas modulares, em que um módulo pode ser substituído mantendo-se a funcionalidade do elevador enquanto se repara a avaria). Mas é igualmente essencial perceber quais as preferências e opinião do utilizador. De facto, um produto de apoio, qualquer que ele seja, só cumprirá os seus objetivos se for utilizado pelo seu destinatário.
6.4 Acesso a edifícios
O produto de apoio mais utilizado para permitir o acesso a edifícios, em particular para vencer desníveis, é a rampa de acesso. Estas rampas permitem reduzir as exigências colocadas pelo ambiente à pessoa. Devem ser construídas num material adequado ao local em que são instaladas (por exemplo, deverão ser perfuradas se estiverem num local em que neva com frequência). Muitas vezes, vêem-se rampas apoiadas sobre os degraus de uma escada, o que lhes confere uma inclinação demasiado elevada: 17/29 = 58,6%, considerando degraus com dimensões padrão. A inclinação máxima destas rampas deve ser de 6%, de acordo com o Decreto-Lei n.º 123/97 de 22 de maio. Significa isso que, para vencer um desnível de 60 cm, o equivalente a aproximadamente três degraus típicos, a rampa ocupará um comprimento de 10 m no solo (Figura 6.12).

Outra solução é o uso de um sistema de lagartas que se apoia sobre, pelo menos, três degraus, e sobe a escada transportando uma cadeira de rodas (ver Figura 6.13). A principal vantagem destes sistemas de lagartas é o facto de não ser necessária qualquer adaptação do meio físico. Por exemplo, num edifício histórico, não é necessário alterar a sua arquitetura exterior para vencer uma escadaria à entrada. A principal desvantagem é a necessidade do auxílio de uma pessoa com formação para a utilização destes equipamentos não possibilitando, assim, o acesso autónomo às escadas.
77

As cadeiras-elevador são uma das soluções mais práticas para acessibilidade a escadas (Figura 6.14). São adaptáveis a quase todo o tipo de escadas (direitas ou com curvas), apoiando-se na própria estrutura da escada (e não na parede ou no corrimão). Entre as principais desvantagens estão o facto de requererem um projeto de instalação prévio, específico para o local em que vai ser efetuada a instalação, e a dificuldade em transferir o equipamento de local, já que sendo uma solução à medida não pode ser deslocada sem o custo extra de reajustamento a um novo espaço. As cadeiras-elevador modernas retornam automaticamente a um ponto de carga quando têm as baterias fracas e possuem botões de chamada, como se de um elevador se tratassem.

6.5 Acesso a veículos
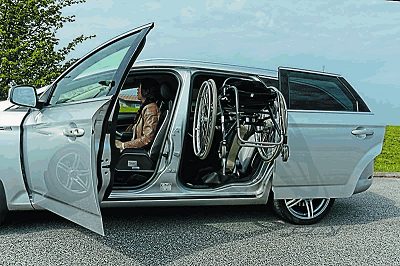
Uma dificuldade muitas vezes sentida por quem se desloca em cadeira de rodas e possui um veículo adaptado é a transição entre a cadeira de rodas e o veículo – como e onde se coloca a cadeira de rodas quando se entra no veículo e como recuperá-la quando se sai? Uma solução adequada para veículos grandes é a utilização de rampas ou plataformas elevatórias (Figura 6.15) para acesso da cadeira de rodas ao interior do veículo. Estas soluções permitem também a transferência de cadeiras de rodas mais pesadas (e.g., elétricas) de e para uma viatura. Para veículos pequenos poderá recorrer-se a sistemas de transferência que permitem também guardar a cadeira no interior (ou exterior) do veículo. Ver exemplo na Figura 6.16.
78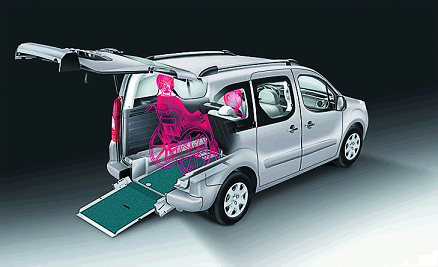

6.6 Produtos de apoio à mobilidade para cegos
As barreiras à mobilidade são sentidas de forma muito particular por pessoas cegas. Estas recorrem aos outros sentidos para obterem informação sobre o ambiente em que se encontram (por exemplo, cheiro, som, correntes de ar, temperatura, textura das superfícies). O produto de apoio mais comum para auxiliar a mobilidade de pessoas cegas é a bengala. Esta transmite ao seu utilizador informação sobre o ambiente de forma auditiva e táctil. São normalmente dobráveis ou telescópicas para se poderem arrumar num bolso quando não são necessárias, e fabricadas em materiais compósitos (e.g., fibra de carbono), conferindo-lhes alguma rigidez mas a flexibilidade adequada para a transmissão de informação da textura do objeto. São baratas e fáceis de usar, mas têm como principais desvantagens o pequeno alcance (normalmente o utilizador move a bengala num arco situado um passo à frente de onde está) e o facto de apenas detetarem obstáculos abaixo do nível da cintura. Existem no mercado produtos de apoio à mobilidade eletrónicos que detetam obstáculos usando sensores de ultrassons ou usando luz no espetro do infravermelho e transmitem a informação ao utilizador de forma táctil (vibrações) ou audível (ver exemplo na Figura 6.17).

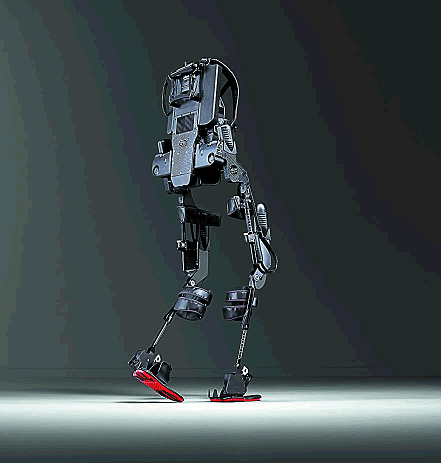
6.7 Exosqueletos
Exosqueletos são dispositivos robóticos que envolvem a pessoa e que têm por objetivo aumentar as capacidades dessa pessoa. Por exemplo, possibilitar o transporte de pesos consideráveis com um esforço mínimo. Na área da Reabilitação tem sido investigada a utilização de exosqueletos para devolver a marcha a pessoas paraplégicas, existindo já produtos no mercado (Figura 6.18). Estes sistemas robóticos suportam o peso da pessoa e são capazes de calcular cada passo com base num conjunto de dados dos seus sensores. O utilizador tem apenas de ser capaz de equilibrar a parte superior do corpo durante a marcha.