5. Interface pessoa/produto de apoio
A interface pessoa/produto de apoio é a fronteira entre o ser humano e o produto, através da qual é trocada informação (Cook & Polgar, 2008). Esta troca de informação é bidirecional, da pessoa para o produto de apoio e vice-versa. A troca de informação do utilizador para o produto de apoio com vista ao seu acionamento tem lugar através de uma interface de controlo. A informação do produto para o utilizador é normalmente visual, auditiva, ou táctil. Neste capítulo descrevem-se diversas interfaces de controlo, as suas características e os métodos de controlo. Dão-se exemplos de vários dispositivos de controlo para seleção direta e para seleção indireta. Embora o exemplo de aplicação mais imediata destes dispositivos de controlo seja o acesso a um computador, até porque muitos dos produtos de apoio estão hoje implementados em sistemas informáticos, os dispositivos de controlo apresentados são genéricos e podem dar acesso a qualquer produto de apoio que os suporte.
5.1 Interfaces de controlo
A interface de controlo é constituída pelo dispositivo de controlo, o conjunto de seleções e o método de seleção (Figura 5.1).

5.1.1 Dispositivo de controlo
O dispositivo de controlo é o dispositivo físico através do qual a pessoa opera ou controla o produto de apoio. Por exemplo, o ecrã táctil de um telemóvel é um dispositivo de controlo.
Estes dispositivos podem gerar sinais de controlo discretos, que assumem apenas um número finito de valores (e.g., um teclado de computador gera um sinal de controlo binário – pressionada/não pressionada – por cada tecla), ou sinais de controlo contínuos, que assumem uma infinidade de valores (e.g., o rato de um computador pode gerar sinais que indicam a posição do ponteiro num dado intervalo de valores correspondente às posições possíveis no ecrã).
5.1.2 Conjunto de seleções
O conjunto de seleções é o conjunto de elementos que são apresentados ao utilizador para escolha. Podem ser letras, palavras, frases, imagens, comandos, etc.
595.1.3 Métodos de seleção
Os métodos de seleção referem-se à forma como o utilizador escolhe um de entre os elementos do conjunto de seleções. Existem dois métodos de seleção: seleção direta e seleção indireta.
Na seleção direta o utilizador escolhe diretamente qualquer um dos elementos do conjunto de seleções, estando todas as opções disponíveis em cada instante. Para tal poderá utilizar, por exemplo, a voz, um segmento corporal, o olhar ou um dispositivo apontador. O rato, o teclado do computador e os sistemas de seguimento do olhar (eye tracking) são exemplos de interfaces de controlo por seleção direta (ver Secção 5.2). Tradicionalmente, a seleção direta era apenas indicada para utilizadores com boa coordenação motora. No entanto, atualmente há interfaces que podem ser controladas por pessoas com movimentos involuntários (e.g., ratos que incluem algoritmos de compensação de tremor para utilizadores com patologias que afetem o controlo do movimento, ou sistemas de seguimento do olhar robustos aos movimentos involuntários de utilizadores com paralisia cerebral).
Na seleção indireta são necessários passos intermédios até se efetuar a seleção. Pode ser efetuada por varrimento ou por codificação.
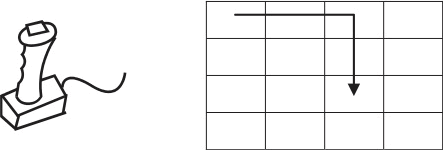
A seleção indireta por varrimento é a mais usual: os elementos do conjunto de seleção vão sendo destacados sucessivamente (destaque visual ou auditivo) e a ritmo constante (definido como velocidade de varrimento). O utilizador gera então um sinal de controlo quando pretende selecionar o elemento destacado. O varrimento requer uma reduzida coordenação motora, estando acessível a qualquer utilizador que consiga efetuar pelo menos um movimento controlado. No entanto, é necessário que o utilizador consiga seguir visualmente (ou auditivamente) o varrimento e tenha boas capacidades de atenção, sequenciação e coordenação oculomotora (ou audiomotora). A seleção por varrimento é mais exigente em termos cognitivos, pois há mais passos entre a ação do utilizador e o resultado dessa ação. É, inerentemente, um método mais lento do que a seleção direta, sendo esta uma das suas principais desvantagens. Formas de acelerar este método de seleção incluem: aumentar a velocidade de varrimento, alterar a ordem com que as opções são apresentadas ao utilizador de acordo com o contexto, ou efetuar o varrimento por blocos (Figura 5.2). Nesta última opção apresentam-se primeiro ao utilizador diversos blocos de elementos, para depois se efetuar a seleção dentro desse bloco (por exemplo, num programa de processamento de texto, escolhe-se primeiro entre os comandos de formatação de texto, os comandos de controlo do ficheiro ou o teclado para escrita, para depois escolher a opção dentro do bloco selecionado). A estratégia mais comum de varrimento é o varrimento linha/coluna, em que as diversas opções estão dispostas numa matriz (tabela). Primeiro são percorridas as linhas até o utilizador selecionar a linha pretendida, percorrendo-se em seguida a linha escolhida, coluna a coluna, até finalmente o utilizador assinalar a opção pretendida (ver Figura 5.2 (B)).
60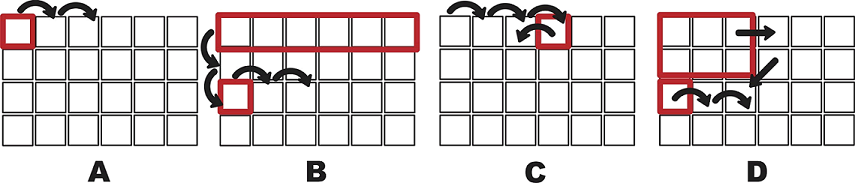
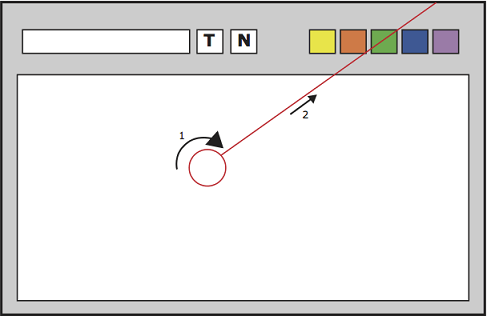
Outra estratégia é a do varrimento radial, em que uma semirreta gira até que o utilizador gere um sinal de controlo (uma seleção), indicando a interseção da semirreta com a opção pretendida. De seguida, um marcador percorre a semirreta a partir da sua origem até que o utilizador gere novo sinal de controlo para fazer a seleção do elemento pretendido (Figura 5.3). Existem outras estratégias de varrimento, sempre com o objetivo de tornar o acesso mais rápido e eficaz. É de notar que, em regra, as estratégias de aceleração dos processos de varrimento estão associadas a um maior esforço cognitivo.
O varrimento direcionado é um método de seleção híbrido, no sentido de que o utilizador seleciona diretamente a direção do varrimento (vertical ou horizontal) e o sistema inicia depois o varrimento automático na direção selecionada. Tal pode ser implementado, por exemplo, com o recurso a um joystick. O utilizador mantém o joystick acionado numa dada direção e a seleção é efetivada ao longo dessa direção quando este liberta o joystick sobre um elemento (Figura 5.4). Este método requer mais passos do que a seleção direta, mas menos do que a seleção indireta por varrimento apenas com um manípulo externo.
Uma segunda hipótese de seleção indireta é o acesso codificado. Neste caso o utilizador usa a interface para introduzir um código correspondente à seleção pretendida. Por exemplo, usa apenas um manípulo para introduzir o código Morse de uma dada letra do alfabeto. O acesso codificado exige poucas capacidades físicas do utilizador e a velocidade de interação está apenas dependente do utilizador, mas é muito exigente em termos cognitivos (em especial em termos de memória e capacidade de sequenciação).
Atualmente, a maioria dos produtos de apoio permite escolher mais do que um tipo de acesso, configurável para cada utilizador (aceita diversos dispositivos de controlo, com diferentes conjuntos de seleção e diferentes métodos de seleção).
Na escolha de um dispositivo de controlo deve ter-se em conta (Cook & Polgar, 2008): as suas dimensões (características espaciais), como é ativado (características de ativação) e que informação é devolvida ao utilizador após a ativação (características sensoriais).
As características espaciais de um dispositivo de controlo incluem:
- Dimensão, forma e peso;
- Número de alvos para seleção;
- Dimensão de cada alvo; e
- Espaçamento entre alvos.
As características de ativação de um dispositivo de controlo são:
- Método de ativação – movimento (dos olhos, da cabeça, da língua, de um membro ou de um grupo muscular), respiração (inspiração ou expiração), fala ou qualquer sinal fisiológico (e.g., eletromiográfico);
- Esforço necessário para uma ativação (e.g., a força necessária para premir o botão do rato);
- Esforço necessário para uma desativação (e.g., o esforço associado ao movimento de levantar a mão para libertar um manípulo);
- Deslocamento para a ativação, isto é, o espaço percorrido entre a posição de repouso do dispositivo e a posição em que se dá a ativação;
- A flexibilidade, referindo-se a diferentes formas de ser ativado (e.g., um manípulo que pode ser acionado com um qualquer segmento corporal é mais flexível que um manípulo ativado pela respiração);
- A durabilidade e a facilidade de manutenção.
Finalmente, as características sensoriais de um dispositivo de controlo englobam a informação auditiva, visual e somatossensorial devolvida ao utilizador pela ativação da interface. Esta informação é relevante para que o utilizador saiba que a seleção foi efetivamente realizada, permitindo-lhe melhorar a utilização e ter a segurança de estar a executar as ações que pretende. Por exemplo, para uma pessoa a iniciar a aprendizagem de um processo de varrimento, poderá ser útil um retorno auditivo que assinale cada ativação. Em geral, quanto mais rica for a informação sensorial proporcionada pela interface, mais fácil é a sua utilização.
Note-se que, na seleção de uma interface de controlo, além das características da interface em si, enumeradas acima, deve sempre ter-se em conta a atividade que se pretende realizar, em que contexto e quais as preferências do utilizador.
5.2 Dispositivos de controlo para seleção direta
O teclado e o rato são os dispositivos de controlo para seleção direta mais usuais.
5.2.1 Teclados
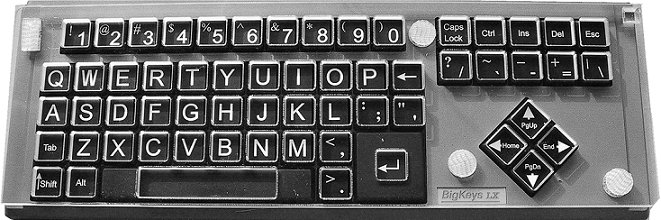
Existem diversos tamanhos de teclados, com diferentes disposições das teclas ou com diferentes tipos de teclas. Os teclados para escrita podem ter dimensões superiores ao normal (teclados expandidos, como o da Figura 5.5) para facilitarem a seleção das diversas teclas por parte de pessoas com dificuldades no controlo fino dos movimentos ou de pessoas com deficiência visual; ou dimensões inferiores, para utilizadores que tenham pouca amplitude dos movimentos e, por isso, não sejam capazes de chegar a todas as teclas de um teclado padrão. Alguns teclados têm uma disposição das teclas mais ergonómica para diminuir o risco de lesões por esforço repetitivo (Figura 5.6). É também possível colocar uma grelha sobre um teclado para que as teclas fiquem em baixo relevo, ajudando a isolar cada tecla, guiando os movimentos da pessoa, e permitindo que esta mantenha as mãos apoiadas sobre o teclado sem efetuar qualquer seleção (Figura 5.7). No entanto, esta solução de “grelha” sobre o teclado levanta o problema de terem de ser desenhadas individualmente para cada teclado, uma vez que estes não são normalizados.
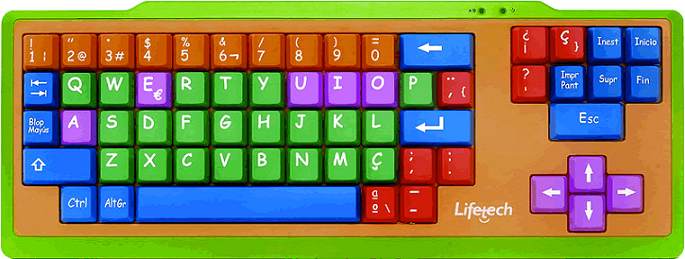

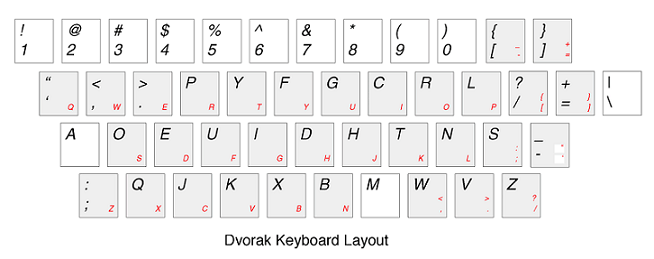
Os teclados QWERTY são os mais comuns, embora tenham sido desenhados para as máquinas de escrever com o objetivo de afastar as letras que são mais frequentemente usadas consecutivamente (nas palavras de língua inglesa), minimizando assim o risco de as máquinas encravarem. Outros arranjos (e.g., Dvorak, Chubon ou ABC, ver (Cook & Polgar, 2008)) podem aumentar a velocidade de escrita, diminuir a fadiga e/ou estar mais apropriados a pessoas que usam apenas uma mão ou um dedo (Figura 5.8). Para crianças ou pessoas com défices cognitivos poderão ser usados teclados de conceitos, em que as letras são substituídas por imagens, símbolos ou palavras representativas de conceitos (Figura 5.9).
Vários sistemas operativos incluem opções de acessibilidade que permitem fazer algumas adaptações para utilização do teclado (ver por exemplo (Microsoft, 2013)) tais como: definir um tempo de atraso de tecla para evitar ativações indesejadas, próprias de pessoas com tremor (é frequente premirem outras teclas antes ou premirem mais que uma vez a tecla pretendida); aumentar o tempo de aceitação para que uma ativação mais demorada não tenha como consequência a repetição da ação, próprio de pessoas com lentidão do movimento (ao demorar a levantar o dedo da tecla, pode desencadear-se a repetição da tecla premida surgindo, por exemplo, no processador de texto uma sequência da mesma letra: “olaaaaaaaaa”); ou eliminar a necessidade de pressionar simultaneamente uma tecla modificadora (CTRL, SHIFT ou ALT) e outra tecla, tornando-as sequenciais, para pessoas que escrevam apenas com um dedo. Estas opções estão hoje disponíveis em vários sistemas operativos (por exemplo, no caso do Windows 7 e 8 estão incluídas no “Centro de Facilidade de Acesso”).
Os teclados também podem ser virtuais, representados num ecrã, sendo a seleção das teclas efetuada através de ecrã táctil ou outros dispositivos de controlo. A utilização destes teclados está hoje banalizada nos telemóveis com ecrã táctil. Os teclados virtuais constituem uma solução em software cada vez mais utilizada como método de acesso ao computador por permitirem acesso direto ou por varrimento.


Questões pertinentes para saber se um dado teclado é apropriado para um utilizador particular incluem (Cook & Polgar, 2008):
- a pessoa consegue alcançar todas as teclas?
- o tamanho, espaçamento e as características sensoriais das teclas são adequadas?
- a velocidade de seleção das teclas pelo utilizador é adequada para a atividade a realizar?
- o utilizador é capaz de acionar as teclas com, pelo menos, 75% de exatidão?
- o utilizador é capaz de acionar simultaneamente uma tecla modificadora (CTRL, SHIFT ou ALT) e outra tecla?
- o utilizador é capaz de controlar a duração de acionamento de uma tecla antes que o seu efeito comece a repetir-se?
- a pessoa pode usar eficazmente um teclado convencional?
5.2.2 Rato e outros dispositivos apontadores
O rato é um dispositivo de controlo para seleção direta. Trata-se de um dispositivo apontador porque o utilizador controla um ponteiro no ecrã, movendo-o para o colocar sobre o elemento a selecionar. Depois de posicionado o ponteiro, a seleção do elemento é feita por um comando, habitualmente através do acionamento de um botão. Por software é possível configurar o rato para que a seleção seja efetuada quando o ponteiro está sobre o alvo durante um tempo determinado (tempo de aceitação[30] 30), evitando-se a necessidade de acionar um botão. Os sistemas operativos incluem diversas opções relacionadas com a configuração do rato que podem tornar mais fácil a sua utilização por pessoas com deficiência, tais como a cor e o tamanho do ponteiro e a sua velocidade de deslocação. A opção Teclas do Rato é ainda outra alternativa, em que as teclas direcionais do teclado podem ser utilizadas para deslocar o ponteiro do rato (útil, por exemplo, para pessoas com movimentos involuntários, que acedem eficazmente a um teclado com proteção de teclas, mas têm dificuldade em controlar o rato).
Para pessoas com uma amplitude de movimentos dos membros superiores limitada existem ratos de bola (trackball), em que a deslocação do ponteiro é efetuada pela rotação de uma bola estacionária. Este tipo de ratos requer apenas que o utilizador tenha controlo sobre movimentos de pequena amplitude, na mão ou dedos, para deslocar a bola (Figura 5.10 (A)). Um joystick também pode ser utilizado para controlar o ponteiro do rato (na Figura 5.10 (B) ilustra-se um joystick acionado pelo movimento do queixo).


Utilizadores cuja funcionalidade motora não permite controlar um rato poderão recorrer a outros dispositivos apontadores mais específicos, tais como sistemas que seguem o movimento de um segmento corporal (e.g., a cabeça ou os olhos) ou interfaces baseadas em sensores eletrofisiológicos (ver Secção 5.4).
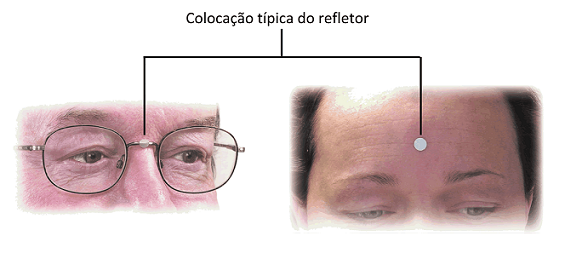
Os dispositivos apontadores por deslocação de um segmento corporal baseiam-se normalmente numa câmara de alta resolução capaz de seguir esse movimento. Por exemplo, para seguir o 66 movimento da cabeça, o utilizador poderá colar um ponto refletor na sua testa, óculos ou na ponta de um chapéu (Figura 5.11) que será captado por uma câmara capaz de determinar os movimentos desse ponto. Uma vez que, mesmo no caso das patologias mais graves, o controlo do olhar é normalmente preservado, os sistemas capazes de seguir o olhar têm recebido cada vez mais atenção e estão hoje disponíveis várias soluções comerciais (Figura 5.12). Nestes dispositivos apontadores a seleção dos elementos pode ser feita de duas formas: 1) o utilizador mantém o ponteiro sobre a opção durante um tempo predefinido (tempo de aceitação), ou 2) através de um sinal de controlo adicional (e.g., usando um manípulo ou, no caso dos dispositivos de controlo pelo olhar, piscando os olhos). Estes sistemas requerem uma calibração inicial. Os sistemas mais robustos funcionam bem em diferentes condições de iluminação e são capazes de seguir o movimento mesmo quando o utilizador tem movimentos involuntários de cabeça de grande amplitude (por exemplo, utilizadores com paralisia cerebral espástica).


Qualquer que seja a solução adotada para sistema apontador é necessário ter em conta os seguintes fatores (Cook & Polgar, 2008):
- o utilizador consegue alcançar todos os elementos usando o dispositivo apontador?
- o tamanho e o espaçamento dos elementos é adequado?
- o utilizador é capaz de completar a ação necessária para efetuar a seleção e realizar outras opções requeridas pelo produto de apoio (e.g., arrastar uma seleção)?
- as características sensoriais da interface e do dispositivo apontador são adequadas?
- a disposição dos elementos no dispositivo apontador favorece a utilização do sistema apontador?
Outros dispositivos de controlo para seleção direta são os sistemas de reconhecimento de fala, capazes de reconhecer os comandos que são dados oralmente pelo utilizador. Estes sistemas podem ser dependentes do utilizador, necessitando de ser treinados pelo próprio para obter um 67 modelo acústico pessoal, ou independentes do utilizador, utilizando um modelo acústico geral para reconhecer comandos de voz sem treino específico. Sistemas de reconhecimento de fala são hoje usados para acesso a computadores, controlo de cadeiras de rodas, ou controlo do ambiente (acender/apagar as luzes, por exemplo).
5.3 Dispositivos de controlo para seleção indireta por varrimento
Os manípulos[31] são os dispositivos de controlo usados tipicamente para seleção indireta por varrimento (ver Secção 5.1.3). Com eles o utilizador consegue gerar sinais binários (ativado/não ativado) permitindo-lhe controlar os processos de varrimento e efetuar a seleção do elemento pretendido. Apesar da tradução de switch para manípulo sugerir a sua ativação com as mãos, existem diversos tipos de manípulos, com diferentes tipos de ativação (mecânica, eletromagnética, elétrica, pneumática ou por som) e com diversas formas e tamanhos, de modo a se adaptarem à região anatómica que os aciona[32] . Os mais comuns são os manípulos de pressão (ver Figura 5.13).
Para a escolha de um manípulo adequado para seleção indireta por varrimento há que responder às seguintes questões (Cook & Polgar, 2008):
- a pessoa consegue ativar o manípulo?
- a pessoa consegue esperar pela apresentação do elemento a selecionar?
- a pessoa consegue ativar o manípulo no instante necessário?
- a pessoa consegue manter a ativação do manípulo?
- a pessoa consegue libertar o manípulo?
- a pessoa consegue repetidamente realizar os passos necessários para uma seleção?

Os manípulos de pressão são, com frequência, montados em braços articulados (Figura 5.14) que facilitam o posicionamento do manípulo junto da zona anatómica usada para a sua ativação (por exemplo, quando se pretende acioná-lo com movimentos laterais da cabeça). Estes sistemas de posicionamento têm a capacidade de se adaptar às necessidades do utilizador, em diferentes contextos. Esta flexibilidade, porém, tem a desvantagem de serem necessários reajustes sempre que o sistema de posicionamento é utilizado.
68
É importante referir que o desempenho de uma pessoa na utilização de um produto de apoio é influenciado sobremaneira pelo seu próprio posicionamento, que deve promover a função, e pelo posicionamento do dispositivo de controlo.
5.4 Dispositivos de controlo baseados em sinais eletrofisiológicos
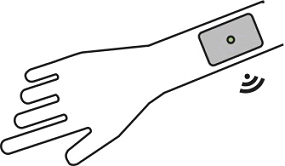
O corpo humano gera sinais elétricos que podem ser captados de forma não-invasiva, à superfície da pele, e utilizados como sinais de controlo. São exemplos os sinais provenientes da atividade muscular (sinais eletromiográficos – EMG), que permitem captar pequenos movimentos (mesmo quando insuficientes para acionar um manípulo) e os sinais provenientes da atividade muscular dos olhos (sinais eletrooculográficos – EOG). Também a atividade elétrica do cérebro (sinais eletroencefalográficos – EEG) pode ser captada por interfaces cérebro/computador[33] , através das quais é possível gerar sinais de controlo, utilizando diferentes métodos. Embora as interfaces cérebro/computador se encontrem ainda em fase de investigação, existem já alguns produtos comerciais (Figura 5.15). A sua complexidade de utilização (tipicamente recorrem a 10 a 20 sensores EEG que devem estar rigorosamente posicionados no escalpe), a dependência de técnicos especializados para a colocação dos elétrodos e a falta de aplicações que respondam às necessidades dos utilizadores, são algumas das barreiras à sua comercialização e generalização (Wolpaw & Birbaumer, 2006). No entanto, os resultados da investigação neste campo são promissores para o futuro destes produtos de apoio. Para os leitores interessados em aprofundar o conhecimento neste tipo de interfaces de controlo, recomenda-se a leitura do artigo (Wolpaw J., 2004).
69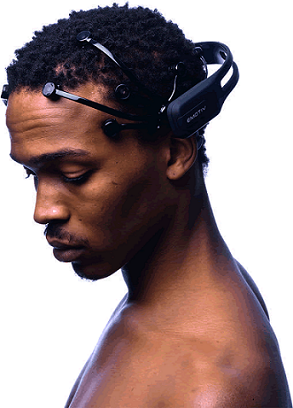
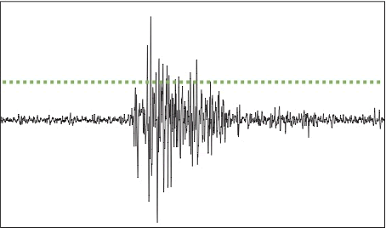
As interfaces baseadas em sinais eletrofisiológicos têm como principal alvo as pessoas com graves limitações motoras. Estas interfaces estão dependentes do desenvolvimento de sensores biomédicos capazes de captar eficazmente os sinais eletrofisiológicos e de técnicas de processamento de sinal adequadas para o acesso a produtos de apoio (Londral, Nunes, Silva, Carvalho, & Azevedo, 2013). Os produtos disponíveis atualmente no mercado requerem normalmente uma fase de treino usando técnicas de biofeedback, em que o utilizador vai adaptando a sua ação consoante o efeito que lhe é mostrado no ecrã (ver exemplo na Figura 5.16).