10. Tecnologias de apoio à Cognição
O termo cognição refere-se à memória, resolução de problemas, atenção, tomada de decisão, aprendizagem, linguagem e outras tarefas relacionadas (Cook & Polgar, 2008). É através da cognição que a pessoa adquire, organiza e utiliza o conhecimento.
A maioria das tecnologias de apoio existentes destina-se a suportar as necessidades de pessoas com limitações motoras ou sensoriais. Só mais recentemente têm sido desenvolvidas tecnologias de apoio cujo objetivo principal é vencer as barreiras colocadas por limitações cognitivas. Apresentam-se primeiro algumas tecnologias de apoio à cognição para adultos, para depois se descreverem tecnologias de apoio à mobilidade e à manipulação cujo fim último é promoverem o desenvolvimento cognitivo de crianças e jovens.
10.1 Tecnologias de apoio à cognição para adultos
As tecnologias de apoio à memória são dispositivos ou programas informáticos que aumentam ou substituem a memória, proporcionando um meio para armazenar informação de uso frequente, ou auxiliando na consulta dessa informação (Cook & Polgar, 2008). Um simples gravador de voz, hoje em dia incorporado em muitos tablets ou telemóveis, é um precioso auxiliar para guardar notas de voz que podem ser ouvidas mais tarde para recordar factos ou compromissos. Os sistemas de predição de texto, discutidos no contexto das tecnologias de apoio à comunicação (Secção 8.4) como uma forma de acelerar a escrita, podem também ser considerados um produto de apoio à memória, na medida em que sugerem palavras, ou mesmo frases, significativas no contexto em causa e que o utilizador poderá querer usar. São ainda, naturalmente, produtos de apoio à linguagem, podendo ser úteis a pessoas com perturbações da linguagem (como já foi referido na Secção 3.3.7). O impacto de sistemas de predição de texto e corretores ortográficos tem sido estudado, tanto em crianças com dificuldades de aprendizagem (Ashton, 2005) como em adultos que sofreram traumatismos cranioencefálicos (Van Hulle & Hux, 2006).
Um tablet ou um telemóvel com acesso à Internet providenciam também um meio de acesso simples e rápido a uma grande quantidade de informação. São, assim, tecnologias de uso comum que poderão ser adaptadas (por instalação de aplicações específicas) para utilizadores com limitações cognitivas, tendo como grandes vantagens a sua portabilidade e versatilidade. No entanto, há que ter em conta que muitas limitações cognitivas estão associadas a limitações sensoriais e motoras que poderão dificultar a utilização destes dispositivos de uso comum, atualmente cada vez mais compactos. Todavia, vários dos sistemas operativos dos telemóveis e tablet contêm opções que facilitam a sua utilização, incluindo controlo por voz, alarmes e conversores texto-fala, além de permitirem a instalação de aplicações específicas. Outro fator a ter em conta é que, para que estes dispositivos constituam, de facto, produtos de apoio eficazes e proporcionem autonomia aos utilizadores, é necessário que as pessoas sejam capazes de as utilizar de forma independente. Para isso é necessário desenhar programas de treino na utilização das tecnologias que recorram a capacidades cognitivas que não estejam afetadas no utilizador. Por exemplo, uma dada pessoa poderá ter dificuldades em memorizar factos ou eventos passados, 105 mas não ter a sua memória procedimental afetada, o que lhe permite recordar como se realiza uma determinada tarefa (e.g., consultar um lembrete num telemóvel), se tiver um treino adequado. É por isso essencial, como amiúde se tem referido, o envolvimento de uma equipa multidisciplinar para a avaliação, seleção, prescrição e treino na utilização de um produto de apoio.
Os produtos de apoio à resolução de problemas são, normalmente, dispositivos capazes de informar o utilizador que uma dada tarefa necessita de ser realizada e que fornecem instruções de como essa tarefa pode ser executada. Na maioria dos casos, é um cuidador que coloca as instruções que deverão ser depois seguidas pelo utilizador. Um exemplo desta classe de produtos de apoio são as caixas de comprimidos que organizam os medicamentos de acordo com a altura do dia em que devem ser tomados. Algumas destas caixas incorporam um sistema de alarmes que permite alertar a pessoa às horas de tomar medicamentos. Naturalmente, tablets e telemóveis com aplicações adequadas podem também ser usados neste contexto.
Os sistemas para auxiliar as pessoas com dificuldades de atenção, tipicamente, controlam os estímulos que são dados de forma a focar o utilizador naqueles que são importantes para a tarefa em causa. Por exemplo, poderá recorrer-se à utilização de um sistema com captação de voz e emissão para um par de auscultadores em contexto de sala de aula para que uma criança com dificuldades de atenção tenha mais facilidade em se concentrar naquilo que o professor está a dizer (Lewis, 2005). Outro exemplo é o desenho de páginas Internet com informação clara, disposta de forma intuitiva, com poucos distratores e, portanto, mais acessíveis a um público mais alargado (ver Secção 2.3).
Têm sido alvo de investigação produtos de apoio à tomada de decisão, de que é exemplo o desenvolvimento de árvores de decisão implementadas em dispositivos portáteis para a realização de tarefas complexas em contexto laboral (Davies, Stock, & Wehmeyer, 2003).
Uma outra área de investigação que tem recebido muita atenção é o desenvolvimento de “ambientes inteligentes” com vista a possibilitar uma vida autónoma nos seus domicílios a pessoas com necessidades especiais, em particular a idosos. Estes Ambientes Domésticos Assistidos[57] incorporam tipicamente sistemas automáticos de monitorização do ambiente, comunicação, controlo do ambiente (luzes, sistemas de climatização, portas e janelas) e de alertas. Nalguns casos, incluem-se também sistemas de monitorização de sinais fisiológicos das pessoas, com o intuito de gerar alertas destinados aos cuidadores ou profissionais de saúde. Um ambiente doméstico “inteligente” poderá suportar as atividades diárias de uma pessoa com dificuldades cognitivas e/ou outras. Por exemplo, a casa poderá ser programada para acordar a pessoa a uma dada hora, abrir os estores, emitir um conjunto de instruções para a pessoa conduzir a sua higiene diária, fazer a cama, preparar o seu pequeno-almoço, tomar a medicação, informar quais as atividades a realizar durante o dia, etc. Um sistema de sensores e alarmes pode ser instalado para detetar se a pessoa não se levantou ou se teve uma queda, para detetar incêndios, inundações e, em geral, qualquer situação potencialmente perigosa. A televisão digital pode incluir aplicações para divulgação, informação ou comunicação entre a pessoa e os cuidadores ou centro de saúde.
106Apesar do grande potencial das tecnologias para a criação de ambientes “inteligentes” para assistência doméstica, em particular num cenário de envelhecimento da população, é necessário contrabalançá-lo com os desejos do utilizador. É importante não se perder de vista que, tal como em todas as tecnologias de apoio, é a pessoa que deve estar no centro de todo o processo. Por exemplo, parecendo importante e útil, do ponto de vista de monitorização, captar imagens 24 horas por dia de todas as divisões da casa, dificilmente uma pessoa aceitará essa invasão da sua privacidade.
Outra questão que deve ser considerada na utilização dos ambientes “inteligentes” é o facto de estas tecnologias poderem contribuir para o isolamento das pessoas. O aumento da sua autonomia dependente de tecnologias e de monitorização remota pode privar as pessoas do contacto pessoal com cuidadores informais, necessário para o seu bem-estar.
Na Europa, justificado pela problemática do envelhecimento da população, existe atualmente um grande interesse por esta área de investigação (ver www.aal-europe.eu), estando em curso projetos de grande dimensão envolvendo vários Estados-membros.
10.2 Mobilidade e desenvolvimento cognitivo
É através de atividades lúdicas que as crianças tomam consciência de si próprias, dos que as rodeiam e dos contextos em que se inserem (Besio & Salminen, 2004). A mobilidade independente é um aspeto crítico dessas atividades lúdicas: dá às crianças a liberdade de explorarem o ambiente de uma maneira independente, promovendo o seu desenvolvimento global (Missiuna & Pollock, 1991). Permite-lhes interagir com o seu meio físico e social, tornando-as participantes ativas da vida, aprendendo que podem fazer as coisas acontecer, ao invés de permanecerem recetores passivos de experiências (Wright-Ott, 1999). Furumasu (1997) mostrou que a mobilidade independente está ligada ao desenvolvimento do raciocínio espacial, ao uso de informação emocional apreendida dos outros, ao desenvolvimento de um novo nível de consciência de si próprio, ao crescimento de estruturas do cérebro, e à emergência de novas capacidades para lidar com fatores ambientais adversos. Por outro lado, é conhecido que crianças com ou sem deficiência que tenham a sua mobilidade reduzida apresentam níveis de desenvolvimento cognitivo abaixo dos típicos para as suas idades. Nisbet et al. (1996) advogam que crianças privadas de mobilidade independente entram num círculo vicioso (Figura 10.1): a incapacidade de se movimentarem de forma independente reduz as oportunidades de participação em atividades lúdicas e a capacidade de exploração do meio físico. As crianças são assim menos estimuladas e têm menos experiências de controlo. Essas privações originam um atraso no seu desenvolvimento que, por sua vez, origina sentimentos de frustração, falta de motivação e de confiança, o que leva novamente a uma redução das oportunidades de participação e exploração, reiniciando-se o ciclo.
107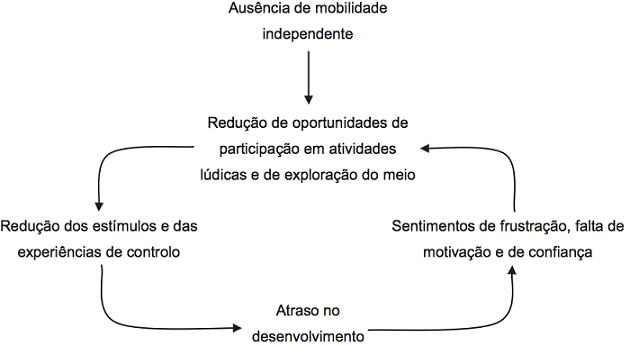
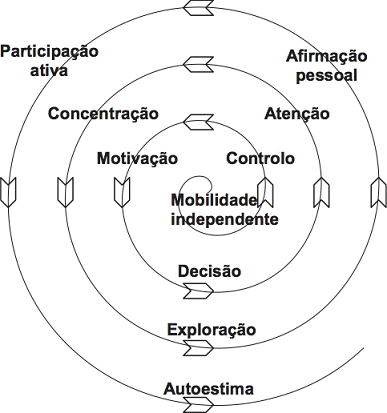
A este círculo vicioso contrapõe-se a espiral de aprendizagem de Kristoffersen et al. (1995) representada na Figura 10.2. A espiral ilustra o facto de a mobilidade independente possibilitar experiências de controlo, aumentando a motivação, permitindo a escolha, melhorando as capacidades de atenção e concentração, possibilitando a exploração, e promovendo a afirmação pessoal, a participação ativa e a autoestima.
Do exposto, é natural concluir que devem ser proporcionadas às crianças que não se conseguem deslocar autonomamente os produtos de apoio necessários para que elas possam movimentar-se de forma independente, contribuindo assim para o seu desenvolvimento global. A intervenção deve ser tão próxima das idades em que as crianças de desenvolvimento típico começam a 108 mover-se de forma independente quanto possível (Butler, 1986). No entanto, pais e terapeutas têm geralmente reservas em aceitar o uso de produtos de apoio à mobilidade por parte das crianças, temendo que (Furumasu, Guerette, & Tefft, 1996; Bottos, Bolcati, Sciuto, Ruggeri, & Feliciangeli, 2001; Carden, Potgieter, & Woods, 2006):
- As crianças se magoem ou magoem outros enquanto usam os produtos de apoio à mobilidade;
- Os produtos de apoio à mobilidade diminuam a motivação das crianças para participar em terapias físicas com vista a adquirirem força e coordenação para andar;
- O aceitar de um produto de apoio à mobilidade signifique uma desistência de que a criança venha a caminhar.
Ceder a estes medos implica privar as crianças da capacidade de se desenvolverem de forma harmoniosa, adicionando aos problemas físicos défices de desenvolvimento cognitivo.
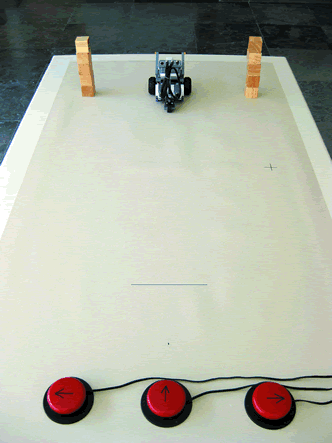
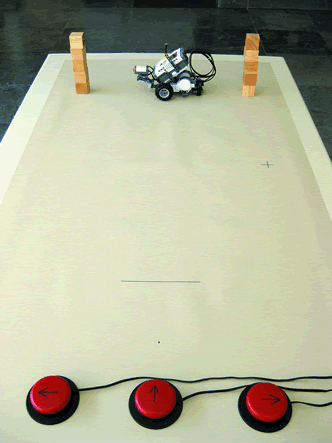
Do ponto de vista tecnológico, é possível contribuir para a segurança das crianças usando sensores que evitem que o produto de apoio colida com pessoas ou objetos. É possível ainda implementar diversos níveis de autonomia que permitam qualquer criança usar o produto de apoio, independentemente das suas capacidades. Caso a criança consiga controlar todos os graus de liberdade do veículo, este deve funcionar num modo teleoperado, totalmente sob o comando da criança, eventualmente mantendo apenas ativos os sistemas de segurança para evitar colisões. Se a criança não conseguir de todo comandar o veículo, este poderá movimentar-se de forma autónoma, proporcionando ainda assim à criança a capacidade de exploração independente do ambiente. Entre estes dois extremos poderão ser implementados outros níveis de autonomia em que a criança vá gradualmente assumindo o controlo sobre o movimento do veículo. Estes mesmos níveis de autonomia podem suportar uma aprendizagem independente da utilização do produto de apoio. De acordo com Kangas (1997), a criança deve aprender a deslocar-se autonomamente, não se pretende que aprenda a guiar. Deve dar-se a liberdade de a criança ir para onde quiser, por ser esse o seu desejo, e não por ser ‘para a frente’ ou ‘para trás’, ‘para a direita’ ou ‘para a esquerda’. As crianças não estão de todo interessadas nas direções, querem apenas ir para onde pretendem sem interferências externas.
É neste contexto de mobilidade para o desenvolvimento cognitivo, em que a mobilidade não é vista como um fim em si, com o objetivo único de assegurar a deslocação da criança de um lado para outro, mas sim como uma capacidade necessária para o desenvolvimento equilibrado da criança, que se insere o veículo PALMIBER (Azevedo, 2006) desenvolvido no âmbito de um projeto do Programa de Cooperação Iberoamericano CYTED. O protótipo deste veículo evoluiu posteriormente para um demonstrador industrial (Figura 10.3).
109
10.3 Manipulação e desenvolvimento cognitivo
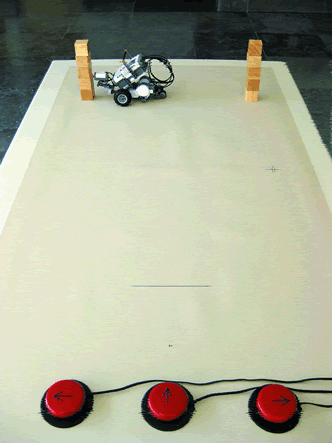
Ainda dentro da classe das tecnologias de apoio à cognição, está a utilização de robôs para apoio à participação em atividades lúdicas e académicas por parte de crianças com dificuldades motoras. A par com a mobilidade (ver Secção 10.2), a manipulação de objetos em contexto lúdico é essencial para o desenvolvimento cognitivo, da linguagem e de capacidades sociais e motoras (Musselwhite, 1986). Crianças com dificuldades motoras que as impossibilitem de manipular objetos podem assim ter o seu desenvolvimento cognitivo comprometido. Neste contexto tem sido explorada a utilização de manipuladores robóticos (Cook, Bentz, Harbottle, Lynch, & Miller, 2005) ou pequenos robôs Lego (Cook, Adams, Volden, Harbottle, & Harbottle, 2011) para possibilitar a estas crianças a participação em atividades lúdicas e académicas. O racional para a utilização de sistemas robóticos é o facto de estes poderem ser programados e, assim, se poderem facilmente adaptar às capacidades de cada criança, permitindo-lhes assumir o controlo do robô até ao limite das suas capacidades. Os resultados dos estudos realizados têm mostrado que crianças, desde muito novas, são capazes de controlar os sistemas robóticos e de os usarem como uma ferramenta para a participação em atividades lúdicas e académicas. Os participantes nos estudos consideraram as atividades suportadas pelos robôs muito mais motivadoras que as atividades com brinquedos adaptados, que tipicamente têm um repertório de ações em resposta à ação da criança muito limitado (por exemplo, o boneco de peluche da Figura 10.4 move-se sempre da mesma forma após a sua ativação por parte da criança). Pelo seu lado, pais e cuidadores ficaram surpreendidos com o desempenho das crianças uma vez que, à partida, não as consideravam capazes de desempenhar as tarefas solicitadas.
110
As baixas expectativas relativamente às crianças com deficiências motoras são muito comuns e podem ter um efeito extremamente negativo no seu desenvolvimento cognitivo. Preconceitos levam a que não lhes sejam dadas as mesmas oportunidades que às crianças de desenvolvimento típico, o que pode atrasar ou limitar o seu desenvolvimento. As crianças com deficiência são usualmente sujeitas a testes cognitivos para aferir as suas capacidades. No entanto, uma vez que muitos dos testes requerem respostas orais ou a manipulação de objetos, ou são desinteressantes e sem sentido para as crianças, elas são muitas vezes classificadas abaixo das suas reais capacidades. Esta é também uma área em que os robôs podem ajudar. Podem ser desenhadas atividades a executar com os robôs que requeiram diferentes capacidades cognitivas que se sabe só estarem presentes a partir de determinadas idades cronológicas em crianças de desenvolvimento típico (ver Figura 10.5). Observando crianças com deficiência a executar essas ativadas adaptadas, é então possível aferir pelo seu desempenho as capacidades cognitivas que possuem e, assim, atribuir-lhes uma idade cognitiva por comparação com o desempenho de crianças de desenvolvimento típico (ver por exemplo (Poletz, Encarnação, Adams, & Cook, 2010) e as referências aí incluídas).
As características que um robô deve ter como produto de apoio à participação em atividades lúdicas e académicas são discutidas em (Cook, Encarnação, & Adams, 2010). Enquadrado no projeto IROMEC (www.iromec.org) foram também estudados os fatores críticos na utilização de robôs interativos para a educação e terapia de crianças com deficiência (Besio, 2008). Têm ainda sido desenvolvidos robôs para interagir com crianças com perturbações no espectro do autismo, na expectativa de que eles possam vencer a barreira que estas crianças tipicamente colocam à interação com outras pessoas. Como referência, indica-se o projeto KASPAR (www.herts.ac.uk/kaspar).
111